نوشته های مشابه



پروفسور «همایون کازرونی» از چهرههای برجسته حوزه مهندسی مکانیک در جهان است که نقش بسیار مهمی در توسعه اسکلتهای رباتیک بیرونی و بهخصوص کمک به افراد دچار معلولیت ایفا کرده است.
به گزارش ایسنا، پروفسور «همایون کازرونی» (Homayoon Kazerooni)، استاد ایرانی مهندسی مکانیک در دانشگاه کالیفرنیا، برکلی است و به عنوان مدیر آزمایشگاه رباتیک و مهندسی انسانی برکلی (Berkeley Robotics and Human Engineering Laboratory) موسوم به KAZ LAB نیز فعالیت میکند.
وی با بیش از ۳۰ سال تجربه در حوزه مهندسی مکانیک، مدرک کارشناسی ارشد از دانشگاه ویسکانسین-مدیسن (UW–Madison) و مدرک دکتری از موسسه فناوری ماساچوست (MIT)، یک متخصص برجسته در زمینه رباتیک، اسکلت بیرونی، دستگاههای پزشکی، سیستمهای انسان-ماشین، مهندسی زیستی، طراحی مکاترونیک و دستگاههای کمکی هوشمند به شمار میرود.
پروفسور کازرونی پیش از تحقیقات مشهور خود در حوزه اسکلت بیرونی اندام تحتانی، گروه خود را در دانشگاه کالیفرنیا، برکلی هدایت کرد تا با موفقیت، سیستمهای رباتیکی را توسعه دهند که قدرت اندام فوقانی انسان را افزایش میدهند.
نتایج این تلاشها، ایجاد دسته جدیدی از «دستگاههای کمکی هوشمند» (IAD) بود که در حال حاضر توسط شرکتهای پیشرو در زمینه حمل مواد برای استفاده توسط کارگران در مراکز توزیع و کارخانههای سراسر جهان به بازار عرضه میشوند.
پژوهشهای بعدی پروفسور کازرونی، بر کنترل سیستمهای انسان-ماشین مختص اندامهای تحتانی انسان متمرکز هستند. پس از توسعه سه اسکلت بیرونی حامل بار شامل بلیکس (BLEEX)، اکسوهایکر (ExoHiker) و اکسوکلایمبر (ExoClimber)، گروه کازرونی در برکلی، اسکلت موسوم به HULC را ابداع کردند. این نخستین اسکلت بیرونی اندام تحتانی با انرژی مستقل و یک ارتوز (Orthotics) است که به کاربر خود امکان میدهد تا وزنههایی به وزن ۲۰۰ پوند (۹۰ کیلوگرم) را برای مدت طولانی حمل کند، بدون این که تحت فشار فیزیکی قرار بگیرد. ارتوز به وسایلی گفته میشود که با هدف اصلاح وضعیت اندام بدن طراحی شدهاند.

پروفسور کازرونی، فناوری اندام تحتانی را برای کمک کردن به افرادی توسعه داده که دچار سکته مغزی، آسیب نخاعی یا بیماریهایی شدهاند که آنها را مجبور به استفاده از ویلچر کرده است.
این اسکلتهای بیرونی پزشکی موسوم به اکسو (Ekso) و فونیکس (Phoenix) امکان راه رفتن، ایستادن و صحبت کردن رو در رو در وضعیت عمودی را برای افرادی که فلج شدهاند، فراهم میکنند. مجوز ساخت فناوریهای اکسو و فونیکس، به شرکتهای اسکو بایونیکس (Ekso Bionics) و سوتکس (suitX) داده شده است.
نگاهی به ابداعات تیم پروفسور کازرونی
بلیکس
اسکلت بیرونی اندام تحتانی برکلی (BLEEX)، یک دستگاه رباتیک است که به قسمت پایین بدن متصل میشود. هدف از ارائه این فناوری، تکمیل قدرت کاربر با افزودن نیروی اضافی به حرکات اندام تحتانی بدن کاربر است. پروژه بلیکس در سال ۲۰۰۰ میلادی توسط سازمان پروژههای پژوهشی پیشرفته دفاعی آمریکا موسوم به دارپا (DARPA) پایهگذاری و تأمین مالی شد و توسط آزمایشگاه رباتیک و مهندسی انسانی برکلی توسعه یافت. دارپا در سال ۲۰۰۱ میلادی ۵۰ میلیون دلار سرمایه اولیه این پروژه را تامین کرد.
بلیکس دارای چهار مفصل فعال هیدرولیکی است که دو مفصل در لگن، یکی در زانو و دیگری در مچ پا قرار میگیرند. این فناوری از نظر انرژی مستقل است؛ به این معنی که یک منبع تغذیه را روی برد خود دارد.
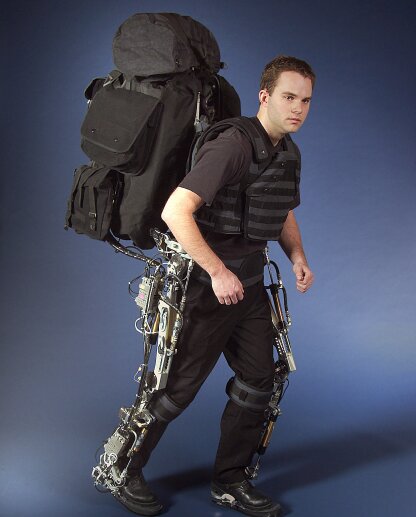
سیستم اسکلت بیرونی برکلی، توانایی حمل بارهای عمده مانند غذا، تجهیزات نجات، کمکهای اولیه، تجهیزات ارتباطی و تسلیحات را برای سربازان، کارکنان امداد، آتشنشانان و سایر پرسنل اضطراری، با حداقل تلاش روی هر نوع زمین در بلندمدت فراهم میکند. چشم انداز بلیکس این است که یک پلتفرم حملونقل همهکاره را برای تجهیزات حیاتی ماموریت فراهم کند.
هدف اصلی پروژه بلیکس در دانشگاه کالیفرنیا، برکلی، ایجاد یک اسکلت بیرونی با توانایی تامین نیروی مورد نظر، برای افزایش قدرت و استقامت انسان است که از نظر مکانیکی قوی، سبکوزن و بادوام باشد.
نخستین نمونه اولیه اسکلت بیرونی آزمایشی از دو پایه قوی، یک واحد نیرو و یک قاب کولهمانند تشکیل شده بود که انواع بارها را میتوان روی آن سوار کرد. این دستگاه به یک پایلوت در قسمت پا متصل میشود و برای جلوگیری از سایش، در بخشهای دیگر سازگارتر است.
اسکلت بیرونی به کاربر امکان میدهد که به راحتی چمباتمه بزند، خم شود، از یک طرف به طرف دیگر بچرخد، بپیچد، راه برود، در شیبهای صعودی و نزولی بدود و در حین حمل کردن تجهیزات و لوازم از زیر موانع عبور کند. کاربر با پوشیدن اسکلت بیرونی میتواند بارهای قابل توجهی را در فواصل بسیاری بدون کاهش چابکی خود حمل کند و در نتیجه، کارآیی فیزیکی او به میزان قابل توجهی افزایش مییابد.
به منظور پرداختن به مسائل مربوط به استحکام میدانی و قابلیت اطمینان، این سیستم به گونهای طراحی شده است که در صورت از دست رفتن قدرت دستگاه در اثر مشکلاتی مانند تخلیه سوخت، بتوان پایههای اسکلت بیرونی را جدا کرد تا دستگاه به یک کولهپشتی استاندارد تبدیل شود.
اکسوهایکر
اکسوهایکر، دستگاهی است که برای حمل کردن بارهای سنگین در طول ماموریتهای طولانی طراحی شده است. این دستگاه، واحد برق، باتری و رایانه داخلی را در بر دارد. همچنین، اکسوهایکر به یک نمایشگر LCD دستی کوچک مجهز است.
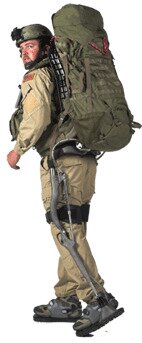
اکسوهایکر بدون نیاز به پنل خورشیدی، ۴۲ مایل (۶۷ کیلومتر) به ازای یک پوند (۰.۴۵ کیلوگرم) باتری و با سرعت متوسط ۲.۵ مایل (۴ کیلومتر) در ساعت کار میکند، اما با افزودن یک پنل خورشیدی کوچک، زمان ماموریت آن نامحدود خواهد بود.
به عنوان مثال، با توجه به فناوری بیسابقه فعالسازی و نیرورسانی، یک باتری با وزن ۱.۲ پوند (۰.۵ کیلوگرم) برای تامین انرژی این اسکلت بیرونی کافی است تا بتواند ۶۸ کیلوگرم (۱۵۰ پوند) بار را به مدت ۲۱ ساعت حمل کند. با وجود این، کاربر هیچ باری را روی شانه خود احساس نمیکند.
ویژگیهای شاخص اکسوهایکر، پایههای جمعشونده، خروج اضطراری سریع از کوله پشتی یا اسکلت بیرونی و رانندگی بدون محدودیت وسایل نقلیه در حین پوشیدن آن هستند. ساخت اکسوهایکر در فوریه سال ۲۰۰۵ به پایان رسید.
اکسوکلایمبر
اکسوکلایمبر طوری طراحی شده است که امکان بالا رفتن سریع از پلهها و شیبهای تند را فراهم میکند، اما همان قابلیت حمل بار بلندمدت اکسوهایکر را ارائه میدهد. محدوده ماموریت اکسوکلایمبر، صعود تا حداقل ۶۰۰ فوت (۱۸۲ متر) به ازای هر پوند (۰.۴ کیلوگرم) باتری در حالی است که یک محموله ۱۵۰ پوندی (۶۸ کیلوگرمی) حمل میشود.
برای مثال، ساختمان امپایر استیت (Empire State Building) حدود ۳۸۰ متر ارتفاع دارد و برای حمل یک محموله ۶۸ کیلوگرمی به طبقه بالای آن، به یک باتری ۰.۹ کیلوگرمی نیاز است.
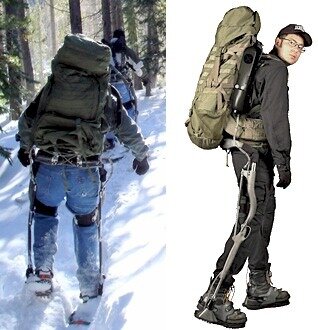
یکی دیگر از منابع انرژی اختیاری اکسوکلایمبر، یک پیل سوختی کوچک است. همچنین، اکسوکلایمبر یک نمایشگر LCD دستی کوچک دارد. از ویژگیهای شاخص اکسوکلایمبر میتوان به پایههای جمعشونده، خروج اضطراری سریع از کولهپشتی یا اسکلت بیرونی اشاره کرد.
HULC
فناوری HULC، یک اسکلت بیرونی رباتیک است که توسط شرکت لاکهید مارتین برای سربازان پیاده ساخته شده است. این اسکلت با نیروی هیدرولیکی خود به سربازان امکان میدهد تا بارهای سنگین را با کمترین فشار روی بدن خود حمل کنند.
انتظار میرود که این سیستم بتواند آسیبهای اسکلتی-عضلانی را که در سربازان به دلیل بلند کردن بارهای سنگین رخ میدهند، کاهش دهد. سربازان با کمک HULC قادر خواهند بود تا وزن ۲۰۰ پوند (۹۰ کیلوگرم) را با تلاش نسبتا کمی تحمل کنند.

وزن بار از طریق کفشهای اسکلت بیرونی به زمین منتقل میشود. این طراحی تضمین میکند که وزن به بدن سرباز منتقل نمیشود و حرکت او را مختل نمیکند. این اسکلت بیرونی برای استفاده در هر زمینی مناسب است.
شرکت لاکهید مارتین در سال ۲۰۰۹ میلادی، مجوز ساخت اسکلت بیرونی HULC را دریافت کرد. این شرکت سعی دارد توسعه طراحی HULC را پیش ببرد تا مزیت به دست آوردن قدرت در عملیات زمینی را برای سربازان فراهم کند. همچنین، لاکهید مارتین در حال تحقیق در مورد طرحهای اسکلت بیرونی برای پشتیبانی از مصارف صنعتی و پزشکی است.
اسکلت بیرونی HULC به هیچ مکانیسم کنترل بیرونی نیاز ندارد زیرا توسط یک ریزرایانه نصبشده در سیستم کنترل میشود. رایانه، HULC را قادر میسازد تا نیاز کاربر را احساس کند و بر اساس آن با شرایط سازگار شود. کل این سیستم را میتوان در ۳۰ ثانیه برداشت و بستهبندی کرد. هنگامی که فرد در خطر است و نیاز به تحرک بیشتری برای فرار از دشمن دارد، میتوان اجزای مدولار سیستم را تعویض کرد.
پروفسور کازرونی علاوه بر تدریس و تجربه پژوهشی در دانشگاه، کارآفرینیهایی نیز دارد. وی در سال ۲۰۰۵، شرکت اکسو بایونیکس (Ekso Bionics) را تأسیس کرد که در سال ۲۰۱۴ به یک شرکت عمومی تبدیل شد و اکنون اسکلت بیرونی اکسو را به تعداد زیادی از مراکز توانبخشی در سراسر جهان عرضه میکند.
کازرونی بعدها شرکت suitX را تأسیس کرد که با بودجه دولتی تامین میشود و اسکلتهای بیرونی صنعتی و پزشکی را ارائه میدهد. شرکت سوتکس توسط شرکت آلمانی اوتوبوک (Ottobock) خریداری شد که بزرگترین شرکت تجهیزات پزشکی اروپایی در اواخر سال ۲۰۲۱ بود.

پروفسور کازرونی جوایز بسیاری از جمله جایزه نوآوری فنی مجله دیسکاور (Discover Magazine’s Technological Innovation Award) و جایزه برجسته ASME Investigator Award را به دست آورده است. تحقیقات این دانشمند ایرانی به عنوان خلاقانهترین فناوریهای سال در مجله نیویورک تایمز شناخته شدند.
پروفسور کازرونی در نقشهای گوناگونی به جامعه مهندسی مکانیک خدمت کرده است و به ویژه سردبیر دو مجله ASME Journal of Dynamics Systems and Control و IEEE Transaction on Mechatronics بود.
این دانشمند برجسته، یک مرجع شناختهشده در زمینه رباتیک به شمار میرود و تا به امروز بیش از ۲۰۰ مقاله منتشر کرده، بیش از ۱۳۰ سخنرانی عمومی در سطح بینالمللی داشته و مخترع بیش از ۲۰۰ حق ثبت اختراع بوده است.
منابع:
berkeley.edu
trends.directindustry.com
emerald.com
انتهای پیام